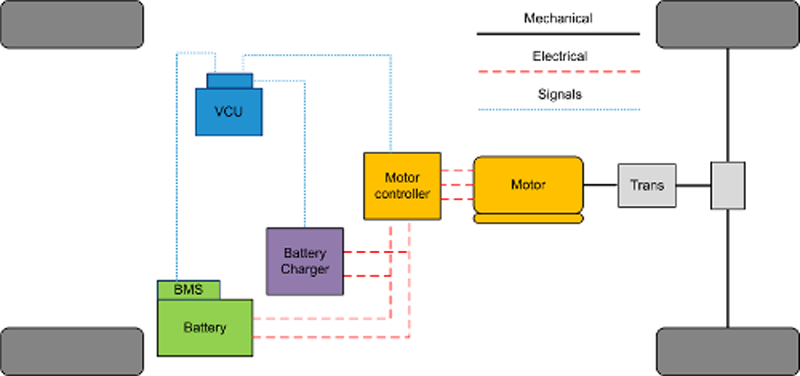
Motor kontrolörü, önceden ayarlanmış bir şekilde bir elektrik motorunun performansını artıran bir cihazdır. Motor kontrolörleri, motoru başlatmak/durdurmak, ileri/geri dönüşü seçmek, hızı seçmek ve kontrol etmek, torku değiştirmek veya sınırlamak ve arızalara ve aşırı yüklere karşı koruma için otomatik veya manuel araçlar içerebilir. Elektrikli araç sistemlerinin ana bileşenleri motor, güç kaynağı, kontrolör, aktarma organları ve şarj cihazıdır. Bir EVM kontrolörü veya elektrikli araç motor kontrolörü, güç kaynaklarından motora giden enerji akışını değiştirerek elektrikli araçların motorları tarafından üretilen torku düzenlemek için kullanılan bir makinedir.

- ICE ile benzerlikler ve farklılıklar
- Bileşenler ve temel performans kriterleri
- Şanzıman ve Güç Kaplinleri - AMT, Çift Debriyaj, CVT
- Kalite Parametrelerini Kaydır
- Dönüştürücüler
- EV'lerin Mimari Geliştirme:
- Sistem Entegrasyonu-Dinamik-Topoloji Seçimi ve Modelleme, Frenleme, Güvenlik
- Menzil / Güç çakışması
- Rejeneratif Frenleme Sistemi
- Motorlar ve Aküler için Termal Yönetim:
- Termal Yönetim Sisteminin Termal Konuları ve İşlevleri
- Termal yönetim Hava Soğutma, Sıvı Soğutma Teknolojileri
- Doğrudan Soğutucu Akışkan Soğutma, Termos Elektrik Modülü
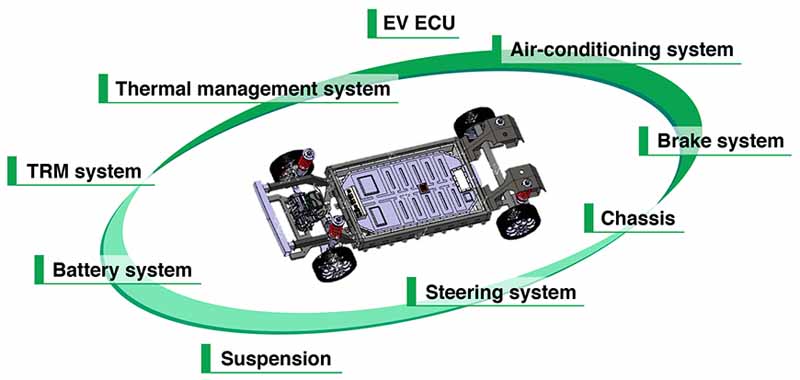
- Mevcut EV Mimarisi
- Hero Electric, Mahindra E2O, Ather Energy, Okinawa övgüsü, gogoro elektrikli scooter hakkında canlı tartışmalar.
EV

Tamamen elektrikli araçlar, çekiş için bir elektrik motoru ve ilgili enerji kaynakları için piller kullanır. EV'nin geleneksel içten yanmalı motorlu araçlara göre emisyon olmaması, yüksek verimlilik, petrolden bağımsız olması ve sessiz ve sorunsuz çalışması gibi birçok avantajı vardır.
Motor ve kontrol teknolojisi, Hibrit Elektrikli Aracın (HEV) ana bileşenlerinden biridir. HEV'nin hızlı tork tepkisini karşılamak için, rotor akı odaklı ve simülasyon modeline dayalı vektör kontrol algoritması söz konusudur ve asenkron asenkron motorun vektör kontrolünü elde etmek için bir platform oluşturmak için kontrolörün donanım ve yazılımı için modüler tasarımlar makalede sunulmuştur. Kontrolörün elektromanyetik uyumluluğunu analiz edin, CAN bus gibi elektromanyetik hassas cihazların normal çalışmasını sağlamak için ilgili anti-jamming önlemlerini alın; deney, önlemin pratik ve uygulanabilir olduğunu kanıtlıyor. CAN bus iletişim güvenilirliğini geliştirmek, açılış sırasını sağlamak ve arıza tedavisi, motor tezgahı deneyine devam edin, statik özelliklerini test edin ve kontrolör parametrelerini ayarlayın. Deneysel sonuçlar, tasarlanan sürüş sisteminin düşük hız ve yüksek tork performansına, geniş bir değişken hız aralığına ve yüksek kapsamlı verimliliğe sahip olduğunu göstermektedir.